Active Standby and Active Active are two different configurations for high availability (HA) and load balancing in computer systems. In both configurations, there are multiple servers available to process requests, but they differ in how those servers are utilized. In an active-standby configuration, there is a single active server processing requests, while the other servers are in standby mode. In contrast, an active-active configuration distributes the workload across multiple active servers. Each configuration has its own advantages and disadvantages and is chosen based on the specific needs of the system. In this response, I will elaborate on the differences between active standby and active-active configurations.
Active-active clustering and active-passive clustering are the two most common configurations for high availability (HA). What is the difference between them? What you should know about the differences between active-active and active-passive nodes.
High-Availability Active-Active Cluster
A cluster that is active-active typically consists of two or more nodes running the same service at the same time. A cluster that is active-active has as its main goal load balancing. Load balancing spreads workloads over all nodes to avoid overloading any one node. There will be an improvement in response time and throughput because there are now more nodes to serve.
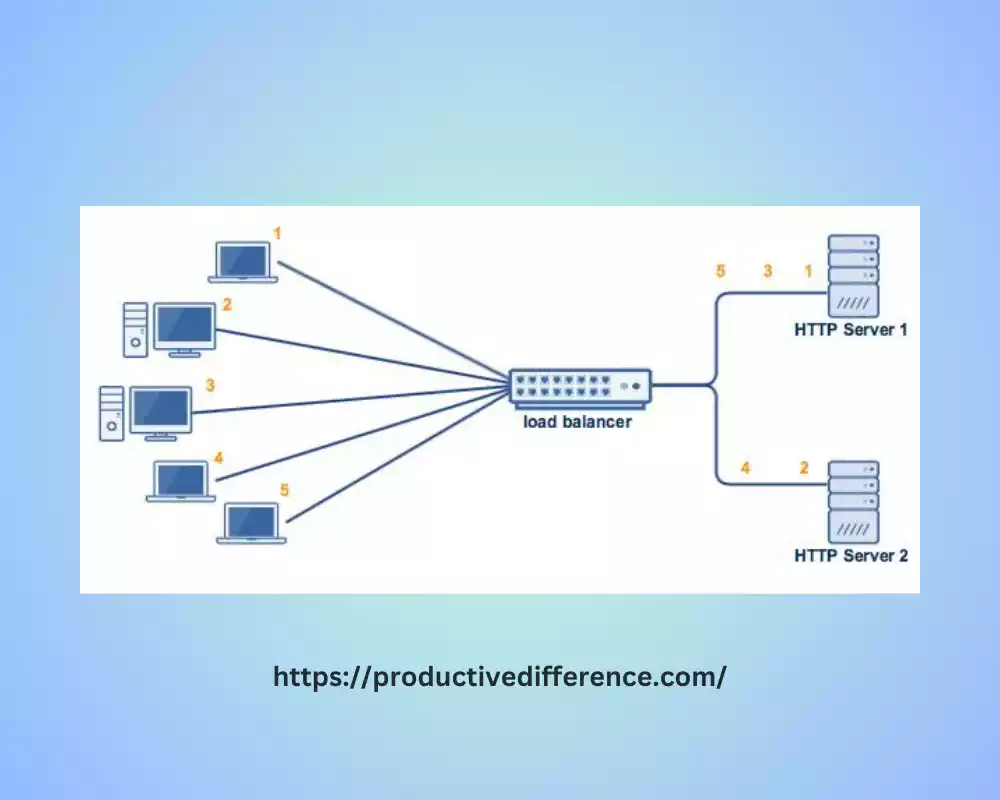
This set-up, which includes a load balancer (ex. This type of cluster configuration is HA. Web clients connect to the load balancer instead of directly connecting to the HTTP server. The load balancer then connects the client to the HTTP servers that are behind it.
It’s not a random process to assign clients to nodes within the cluster. It’s determined by the load balancing algorithms set up on the load balancer. In a “Round Robin”, for instance, the client that connects first is sent to the server. The second client then goes to the server. In a subsequent post, we’ll go into more detail about these algorithms.
High-Availability Active-Passive Cluster
A cluster configured as active-passive also has at least two nodes. As the name “active/passive” suggests, not all nodes will be active. If there are two nodes and the first one is already active, then the second must be passive, or in standby.
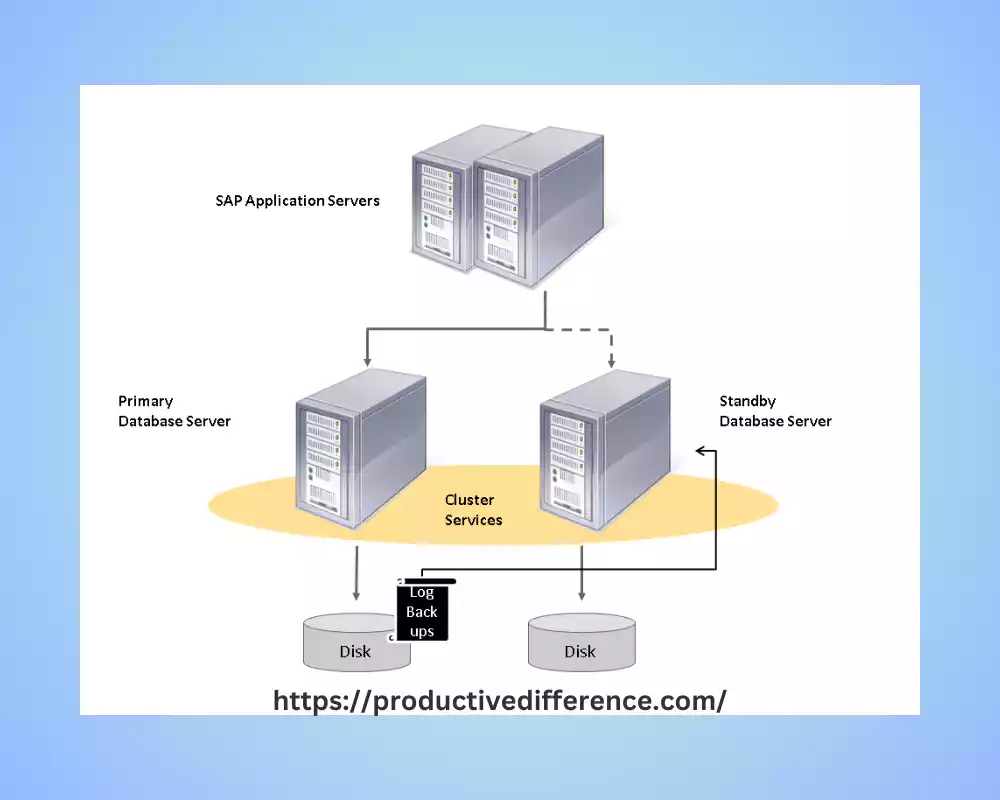
Active-passive failover is used when one of the nodes fails. The passive server (failover server) serves as a backup server that can take over immediately if the primary server (active server) becomes disconnected or unable to function.
Key Distinctions in Performance
While both setups aim to enhance system reliability, they differ in how they achieve this goal:

- Active Standby Performance: Active standby ensures quick failover and minimal service disruption. Since the standby unit remains idle until a failover occurs, resource utilization is not maximized during normal operation.
- Active Active Performance: Active active configurations provide optimal resource utilization even during routine operation, as all active units are processing requests. This leads to efficient workload distribution and higher overall system performance.
Difference Between Active Standby and Active Active
The terms “Active Standby” and “Active Active” refer to different configurations in high availability (HA) systems. Understanding the distinction between these two configurations is crucial for designing systems with optimal performance and reliability.
- Active Standby:
-
- Concept: In an Active Standby setup, one system (the active system) handles all the workload, while the other system (the standby system) remains idle or performs non-critical tasks. The standby system is essentially a backup that is ready to take over in case the active system fails.
- Failover: When the active system fails, the standby system takes over, minimizing downtime. This failover can be automatic or manual, depending on the system configuration.
- Resource Utilization: The standby system is typically underutilized since it’s primarily a backup, waiting to take over in case of failure.
- Complexity and Cost: Generally simpler and less expensive than an Active Active setup because the standby system does not need to be as powerful or resource-intensive.
- Ideal Use Cases: Suitable for scenarios where downtime can be tolerated for a short period, and the cost needs to be optimized.
- Active Active:
-
- Concept: In an Active Active configuration, two or more systems run simultaneously, sharing the workload. Both systems are active and capable of handling requests.
- Load Balancing: Requests or tasks are distributed between the systems, which can improve performance and reduce the load on individual systems.
- Failover: If one system fails, the other continues to operate, providing seamless failover with minimal or no downtime.
- Resource Utilization: Both systems are utilized effectively, leading to potentially higher resource usage but also improved performance.
- Complexity and Cost: More complex and typically more expensive due to the need for systems that can handle the full workload and the mechanisms to distribute it.
- Ideal Use Cases: Best suited for critical applications where downtime is not acceptable and performance is a priority.
Comparison Table about Active Standby and Active Active
Comparison table about “Active Standby” and “Active Active” involves outlining the key differences and similarities between these two system architectures. Here’s a basic comparison table to illustrate some of the main aspects:
| Feature | Active Standby | Active Active |
| Definition | A system architecture where one system is active and handling tasks, while another is on standby to take over in case of failure. | A system architecture where two or more systems are active and running tasks simultaneously. |
| Redundancy | Provides redundancy through a standby system that is idle until needed. | Offers redundancy with multiple systems actively running in parallel. |
| Resource Utilization | Lower resource utilization as the standby system is idle most of the time. | Higher resource utilization as all systems are active and sharing the workload. |
| Failover Time | Potentially longer failover times, as the standby system may need to be brought online. | Typically quicker failover, as other active systems can immediately take over the tasks of a failed system. |
| Load Balancing | No load balancing, as only one system is active at a time. | Inherent load balancing, as tasks, are distributed among multiple active systems. |
| Complexity | Less complex, and easier to manage due to a single active system. | More complex, and requires sophisticated management to coordinate multiple active systems. |
| Cost | Generally less expensive, as fewer resources are actively used. | More expensive due to the need for multiple active systems and infrastructure. |
| Suitability | Suited for systems where high availability is important but not critical. | Best for environments where high availability and performance are critical. |
This table provides a general comparison, but the specific details can vary based on the implementation and the specific requirements of the system or application in question.
Use Cases for Active Standby and Active Active
Both active standby and active active configurations find their niche in various use cases.
Active Standby Use Cases
- Network Routers: Active standby is commonly employed in network routers, where the standby unit takes over seamlessly if the primary router fails, ensuring uninterrupted connectivity.
- Data Centers: Critical applications in data centers often use active standby to maintain continuous operation, safeguarding against server failures.
- Telecommunication Systems: Telecommunication infrastructure relies on active standby to provide uninterrupted communication services, even in the event of hardware failures.
Active Active Use Cases
- E-Commerce Platforms: Active active configurations are ideal for e-commerce websites that experience fluctuating traffic. Resources are optimally distributed to handle varying customer demands.
- Content Delivery Networks (CDNs): CDNs leverage active-active setups to efficiently distribute content to users, minimizing latency and ensuring swift access to web resources.
- Financial Services: Active active is crucial in financial services where real-time transactions and data processing demand high availability and rapid response times.
Challenges and Considerations
Implementing active-active and active-standby configurations is not without the same set of issues and concerns. Here are a few key aspects to be aware of for each configuration:
Active-Standby:
- Resource Underutilization: When active-standby is enabled the standby component stays inactive until a failure occurs. This can lead to inadequate resource utilization since you’re basically paying for hardware that’s not actively contributing to the processing of workloads.
- Fast Failover: Speed at the point that failover happens is crucial to minimizing downtime. Inadequate detection of failures and reverting to standby can affect the availability of service.
- Data Synchronization: Ensuring that standby components are equipped with the most current data and configurations could be a bit complicated. Data synchronization systems must have been in place so as to keep continuity between standby and active components.
- Testing and maintaining: Regular maintenance and testing of standby components is vital to ensure that they operate properly when required. This could result in operational costs.
Active-Active:
- Load Balancing: The proper load balancing mechanism is vital for active-active configurations in order to effectively distribute the workload or traffic between active components. Unbalanced load distribution can result in uneven workloads and problems with performance.
- Data consistency: Stabilizing data consistency over multiple active components may be difficult, especially in storage or databases that are distributed systems. Methods such as distributed transactions could be needed.
- Complexity: Configurations for Active-Active setups can be complicated to create, implement, and manage compared to standby configurations. This can result in higher operational costs and demand for qualified staff.
- Scalability: Although active-active may improve capacity, it is essential to anticipate the expansion of your system. Making sure that the addition of active components doesn’t cause obstructions or limitations to the architecture is vital.
- Failure Isolation: In active-active configurations, a malfunction in one component shouldn’t be able to cascade to affect other components. The proper isolation and fault-tolerant designs are essential to prevent massive outages.
- Monitoring and Control: Monitoring and managing tools that are effective is crucial to ensure the performance and health of every active component. It includes alerts in real-time as well as automated procedures for dealing with malfunctions.
Finale
Active-standby and active-active are two different configurations for high availability and load balancing in computer systems. Active-standby provides redundancy with only one server actively processing requests, while active-active provides better utilization of resources with multiple servers processing requests simultaneously. The choice between the two configurations depends on the specific requirements and constraints of the system, with active-standby being simpler and easier to manage, and active-active providing better performance and utilization at the cost of added complexity.